Beyond Robustness: A Taxonomy of Approaches towards Resilient Multi-Robot Systems (Notes)

(Authors: Amanda Prorok, Matthew Malencia, Luca Carlone, Gaurav S. Sukhatme, Brian M. Sadler, and Vijay Kumar)
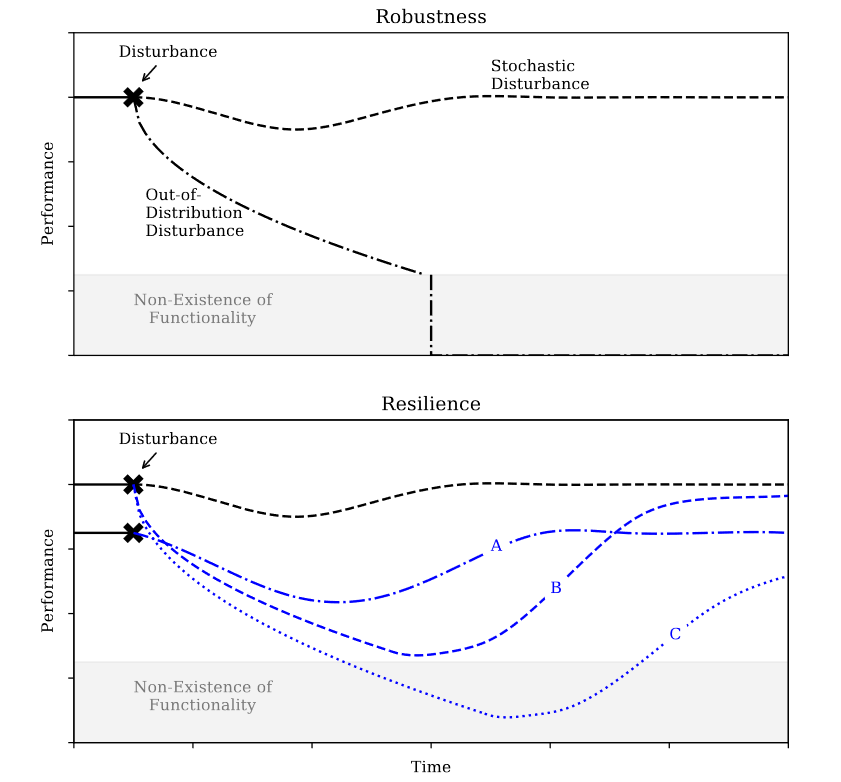
There is a difference between robustness and resilience.
Robustness is the ability to maintain functionality in the presence of (previously modeled) disturbances.
Resilience, on the other hand, deals with “unexpected disturbances”.
A resilient system can maintain functionality despite previously un-modeled disturbances affecting the system.
The system achieves such resilience by either A) anticipating failure, B) adapting to the situation, or even C) system-wide reorganization to deal with the unexpected disturbance.
Robust systems mitigate. Resilient systems adapt.
In multi-robot systems, resilience aims at withstanding unknown/unmodeled situations, using even a system-wide transformation if needed, to maintain functionality, (or at-least decrease time-lapse before coming back up,) by any means of re-configuration necessary.